
Jun 11, 2024 | 3 min read
Teoría de probabilidades para todas las edades#
\( \newcommand{\bra}[1]{\langle #1|} \) \( \newcommand{\ket}[1]{|#1\rangle} \) \( \newcommand{\braket}[2]{\langle #1|#2\rangle} \) \( \newcommand{\i}{{\color{blue} i}} \) \( \newcommand{\Hil}{{\mathbb H}} \)
Show code cell source
%run ../../macro_tQ.py
import sys
sys.path.append('../../')
import macro_tQ as tQ
import numpy as np
Variables aleatorias#
Denotamos con \((X,p(X))\) una variable aleatoria donde
\(X\) es el espacio muestral de valores \(\{x_1, x_2,....,x_n\}\) que pueden aparecer en una consulta, o tirada
\(p(X)\) es la distribución de probabilidad.
Distribución de probabilidad#
Una distribución de probabilidad es una función \(x\to p(x)\) de los elementos del espacio muestral real \(x\in X\) en los números reales \(p(x)\in \mathbb{R}\). La probabilidad de un suceso imposible es \(p(x) = 0\), y la de un suceso seguro es \(p(x) = 1\).
La función \(p(x)\) que debe verificar las dos condiciones siguientes para ser una distribución de probabilidad
Es decir, la suma de probabilidades de todos los sucesos posibles debe ser la unidad, porque es la probabilidad de obtener algún miembro del espacio muestral.
Definición:
Media: la media de una variable aleatoria viene dada por la expresión
Varianza: la varianza, \(\sigma_X^2\), es la media de la desviación cuadrática \(\overline{(x_i - \overline{X} )^2}\)
La cantidad \(\sigma_X\) se denomina desviación estándar
def random_prob_dist(n):
p = np.random.rand(n)
p /= np.sum(p)
return p
random_prob_dist(10)
array([0.06550321, 0.00045257, 0.22756174, 0.07922132, 0.19390968,
0.03356594, 0.16785773, 0.08862708, 0.10628265, 0.03701809])
La conexión estadística#
Nuestro conocimiento del mundo se basa en la realización de experimentos, el resultado de los cuales es (empíricamente) aleatorio.
Podemos pensar en el hecho de medir un sistema como la consulta de una variable aleatoria \((X,p(X))\) donde la distribución de probabilidad incorpora todo nuestro conocimiento acerca del sistema
Frecuencias e Histogramas#
Cualquier consulta o medida da lugar a una muestra finita de valores \(A_N = (a_1,a_2,...,a_N)\) donde \(a_i\in \{x_1,...,x_n\}\) pueden repetirse en la muestra, con números de aparición \(n(x_i)\) tales que \(n(x_1) + \ldots + n(x_p) = N\).
Estos datos se pueden agrupar en intervalos o bins que eliminen cierta precisión numérica.
Por ejemplo, si truncamos nuestra precisión a las décimas de unidad, \(13.10\) y \(13.19\) pertenecerán al mismo bin.
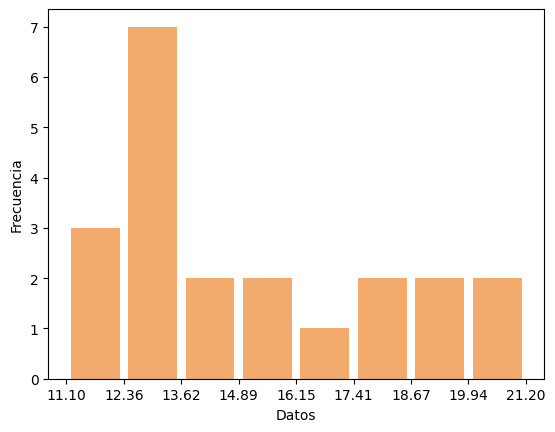
Un histograma es un diagrama en el que, por cada bin, hay una columna, cuya altura representa el número de sucesos que pertenecen a dicho bin
En el siguiente ejemplo, puedes ver cómo, la misma lista de datos conduce a distintos histogramas si cambias la anchura de los bins
import numpy as np
import matplotlib.pyplot as plt
datos1 = [12.2, 15.3, 13, 12.8, 18.1, 13, 20, 19.5, 20.2, 12.1, 12.4, 13.2, 17.9, 14.1, 15, 13.4, 11.1, 14.6, 13, 17.4, 19.2]
datos2 = np.linspace(0.,10.,200)
datos = datos1
anchura_bins = 1.# para modificar la anchura de los bins
num_bins = int((max(datos)-min(datos))/anchura_bins) #número de bins
bins_list = np.linspace(min(datos), max(datos) + 1 ,num_bins) #calculamos los extremos de los intervalos
counts, bins, ignore = plt.hist(x=datos, bins = bins_list, color='#F2AB6D', rwidth=0.85)
plt.xlabel('Datos')
plt.ylabel('Frecuencia')
plt.xticks(bins_list)
plt.show()
Ley de los grandes números#
Las fracciones relativas tienden en el límite \(N\to \infty\) a la probabilidad relativa de aparición de \(x_i\) en una sola tirada
Experimentalmente sólo tenemos acceso a las frecuencias relativas \(f_N(x_i)\) para un \(N\) grande aunque finito.
Igualmente, nuestro conocimiento de la media \(\overline X\) y la varianza \(\sigma_X^2\) siempre es aproximado, y se realiza a través de las medias y varianzas muestrales
Distribuciones frecuentes#
La distribución de Bernouilli#
Una variable aleatoria de Bernouilli \(X=(x,p(x))\) tiene dos posibles resultados
éxito \(\to x=1\) con probabilidad \(p(1) = p\)
fracaso \(\to x=0\) con probabilidad \(p(0) = 1-p\)
Podemos calcular fácilmente
Distribución binomial#
La variable aleatoria binomial \(X = (x,p(x))\) se define como
Claramente \(x \in (0,1,2,...n)\).
Ahora es muy sencillo obtener la probabilidad de un suceso con \(x\) éxitos
donde el primer factor tiene en cuenta las posibles ordenaciones en que aparecen \(x\) éxitos en \(n\) intentos.
Un cálculo un poco más largo permite ver que, ahora
La distribución normal#
Vamos a estudiar la distribución normal centrada en \(\mu\) y con anchura \(\sigma\)
Nos encontramos ante una variable aleatoria con un espacio muestral continuo \(x\in (-\infty,+\infty)\).
'generamos una instancia de la distribución normal'
mu, sigma = 0, 0.1
N = 10000
s = np.random.normal(mu, sigma, N)
import matplotlib.pyplot as plt
'generamos una instancia de histograma con un número de bins'
num_bins=100
counts, bins, ignore = plt.hist(s, num_bins, density=True)
'extraemos los bins para hacer el plot de la funcion analítica'
'dibujamos la función analítica para comparar'
def gaussian(x,mu,sigma):
return 1/(sigma * np.sqrt(2 * np.pi))*np.exp( - (x - mu)**2 / (2 * sigma**2) )
plt.plot(bins, gaussian(bins,mu,sigma),linewidth=2, color='r')
plt.show()
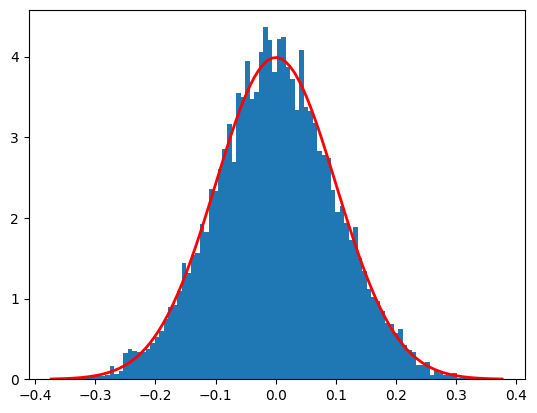
En el límite de número de eventos \(N\to \infty\), el histograma y la curva matemática confluyen.
Probabilidades combinadas#
Las probabilidades combinadas son la base de las correlaciones. Es aquí donde la Mecánica Cuántica predice resultados diferentes a la Mecánica Clásica.
Ahora vamos a examinar variables aleatorias formadas por dos espacios muestrales \(X\) e \(Y\). Dependiendo de la forma en que combinemos la observación de cada una tendremos distintas distribuciones de probabilidad
Probabilidad combinada#
La probabilidad combinada \(p(X,Y)\) asocia un número \(p(x,y)\) a la probabilidad de observación conjunta de \(x\) e \(y\).
Hay que tratar las parejas de eventos como un solo evento \(a = (x,y)\). Por eso, la condición de normalización ahora es
La suma parcial sobre una de las dos variables conduce a sendas distribuciones marginales
Si la probabilidad combinada es el producto de las probabilidades de los miembros del par, decimos que \(X\) e \(Y\) son variables aleatorias independientes
La distribución de cada variable coincide con la que se deduce de marginalizar la otra
Probabilidad condicionada#
La distribución de probabilidad condicionada \(p(X|Y)\) asigna un número \(p(x|y)\) a la probabilidad de encontrar un suceso \(X=x\) una vez sabemos que \(Y=y\) ha sido el resultado de consultar \(Y\).
La manera de acceder experimentalmente a estas distribuciones, es efectuar un muestreo \((a_i,b_i)\), \(i=1,...,N\) de valores de \((X,Y)\) y seleccionar sólo aquellos sucesos donde \(b_i = y\) un valor concreto de \(Y\).
Teorema de Bayes#
Las probabilidades condicionales y combinadas no son independientes. Se relacionan de la forma siguiente
La segunda igualdad conduce al teorema de Bayes
Teorema: de Bayes